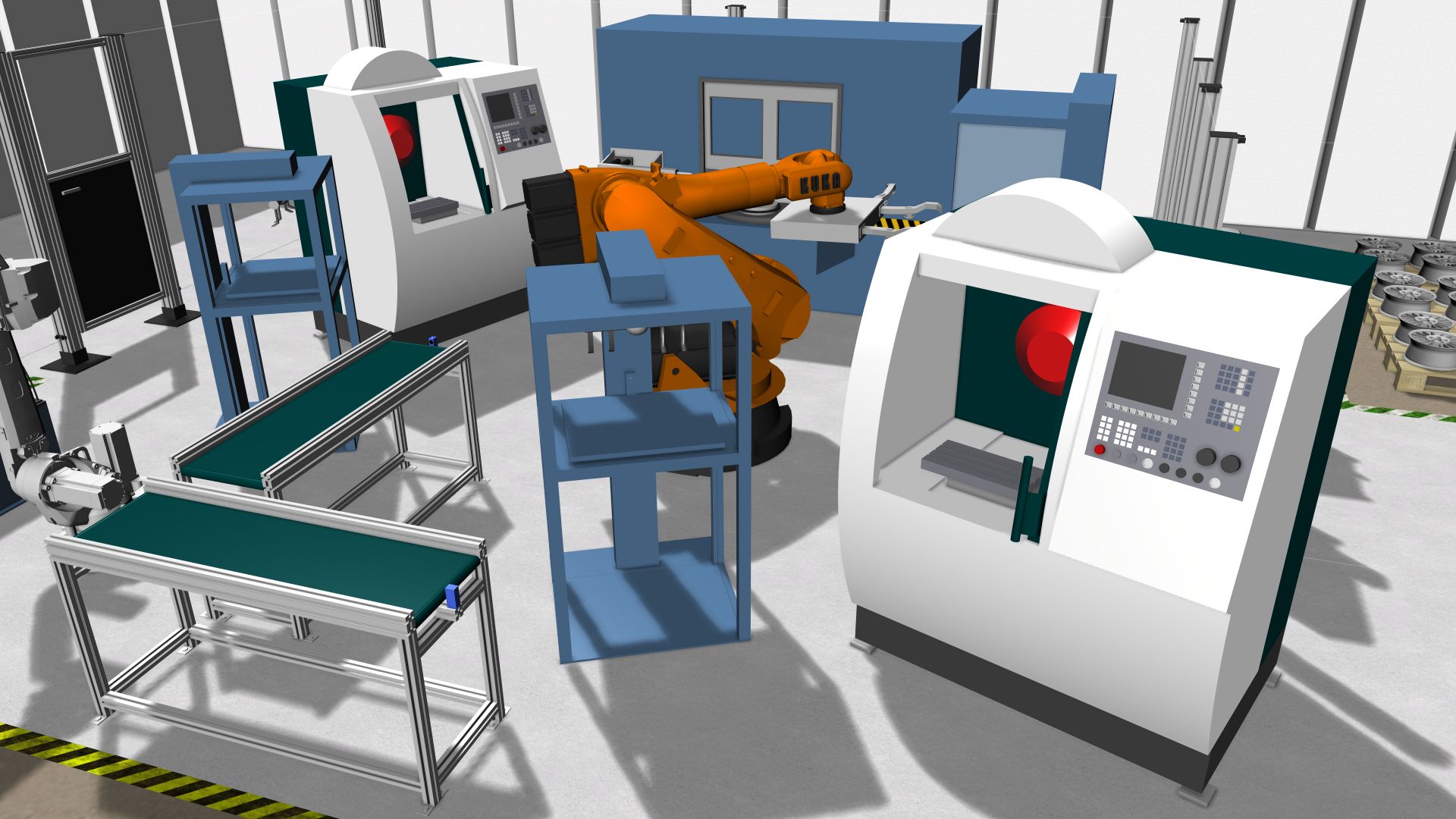
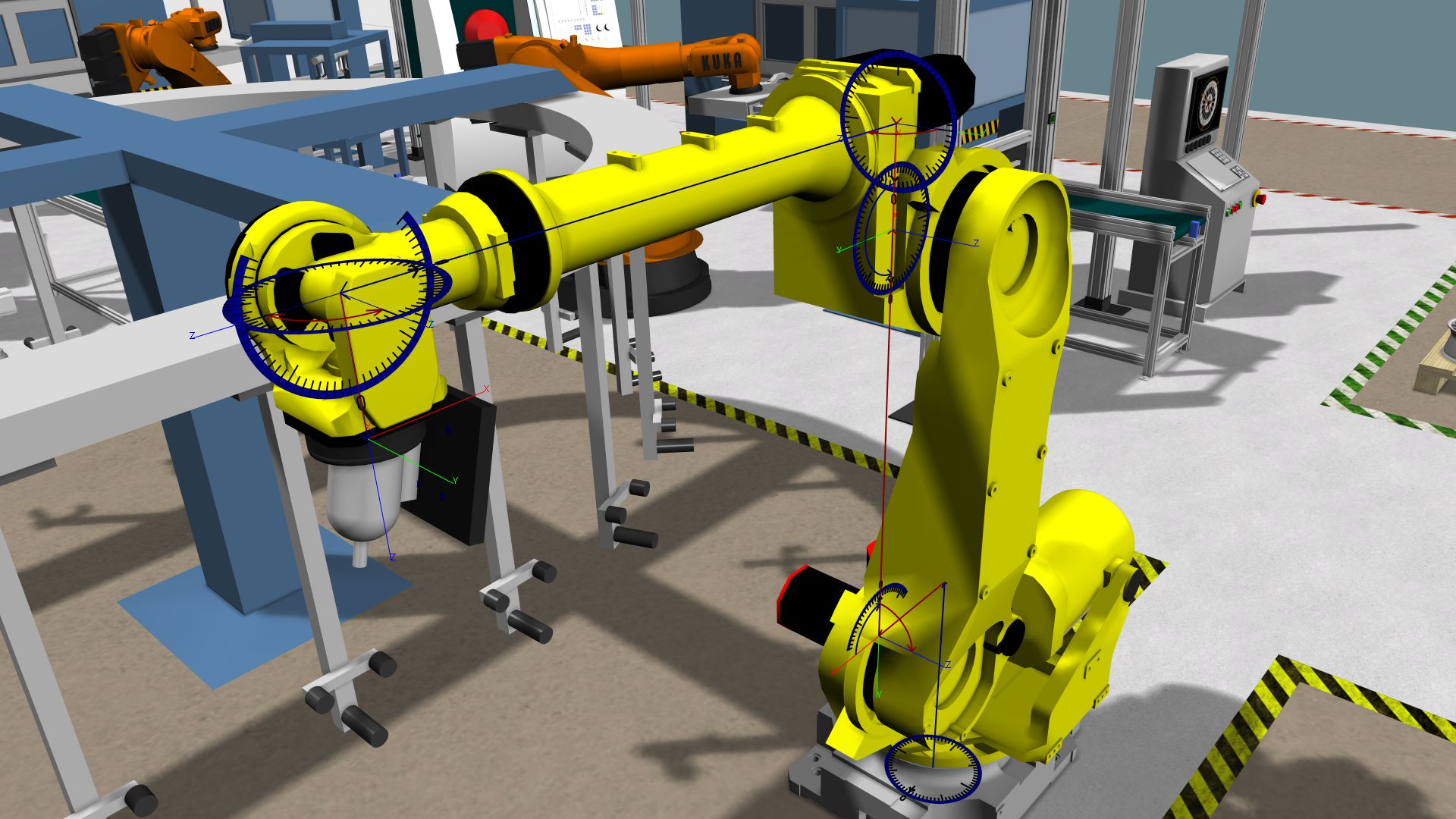
CIROS Studio is the software for 3D factory simulation. With CIROS Studio, users model layouts and processes, simulate robotic work cells and automated manufacturing plants, and visualize complex sequences. CIROS Studio brings together the domains planning, design, electrical wiring, controller development, commissioning, sales, and marketing. For more than 25 years now, we have been developing the software, distributing our solutions successfully in industry, and offering maintenance, support, training, and services. If you want to learn more about CIROS Studio addressing your individual use case, we will be glad to fix a date for a web-based presentation. In the following, you will find an overview of CIROS Studio.
Compare CIROS Studio with other 3D simulation solutions such as Siemens Process Simulate (Tecnomatix), Siemens RobotExpert or DELMIA from Dassault Systèmes (3ds). Discover CIROS Studio as a technically equal alternative at significantly lower acquisition and maintenance costs. Benefit from the continuous development of our software made in Germany. You have individual ideas and customization requests? No problem: We react quickly and competently to your ideas!
Why simulation with CIROS Studio? Save costs! Avoid wrong planning, wrong developments and wrong acquisitions by secured decisions. Realize shorter cycle times. Reduce the risk of delayed commissioning. Win new employees and increase employee satisfaction by using the latest high-end software. Arrange a free potential check for your company!
Among others, CIROS Studio is used for the following applications:
CIROS Studio users mainly come from the following industrial sectors:
These are the top features of CIROS Studio:
CIROS Studio is the modular software for 3D factory simulation. By assembling relevant packages, you will obtain the optimal software for exactly your use case. Additional packages can be added fast and easily at a later date. The following packages are available:
The basic package allows for the modeling and simulation of geometries, mechanics, and electrics.













The model animation package contains features for plausible visualizations while avoiding complex modeling for true simulation.






CIROS Studio can do a lot – but not everything:
The following lists the requirement of CIROS Studio concerning hardware and software.
CIROS is being developed for Microsoft Windows 11 for x64 processors. You should use a Windows version that still receives mainstream support from Microsoft.
We would be glad to support your effective work with CIROS Studio:
Are you are interested in using CIROS Studio? This is how to go on:
Here, you can find further information on the Internet:
Here, you can download information:
You are currently viewing a placeholder content from Vimeo. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from YouTube. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou need to load content from reCAPTCHA to submit the form. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Facebook. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from Instagram. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More InformationYou are currently viewing a placeholder content from X. To access the actual content, click the button below. Please note that doing so will share data with third-party providers.
More Information{kind=link}
{kind=link}
{kind=link}