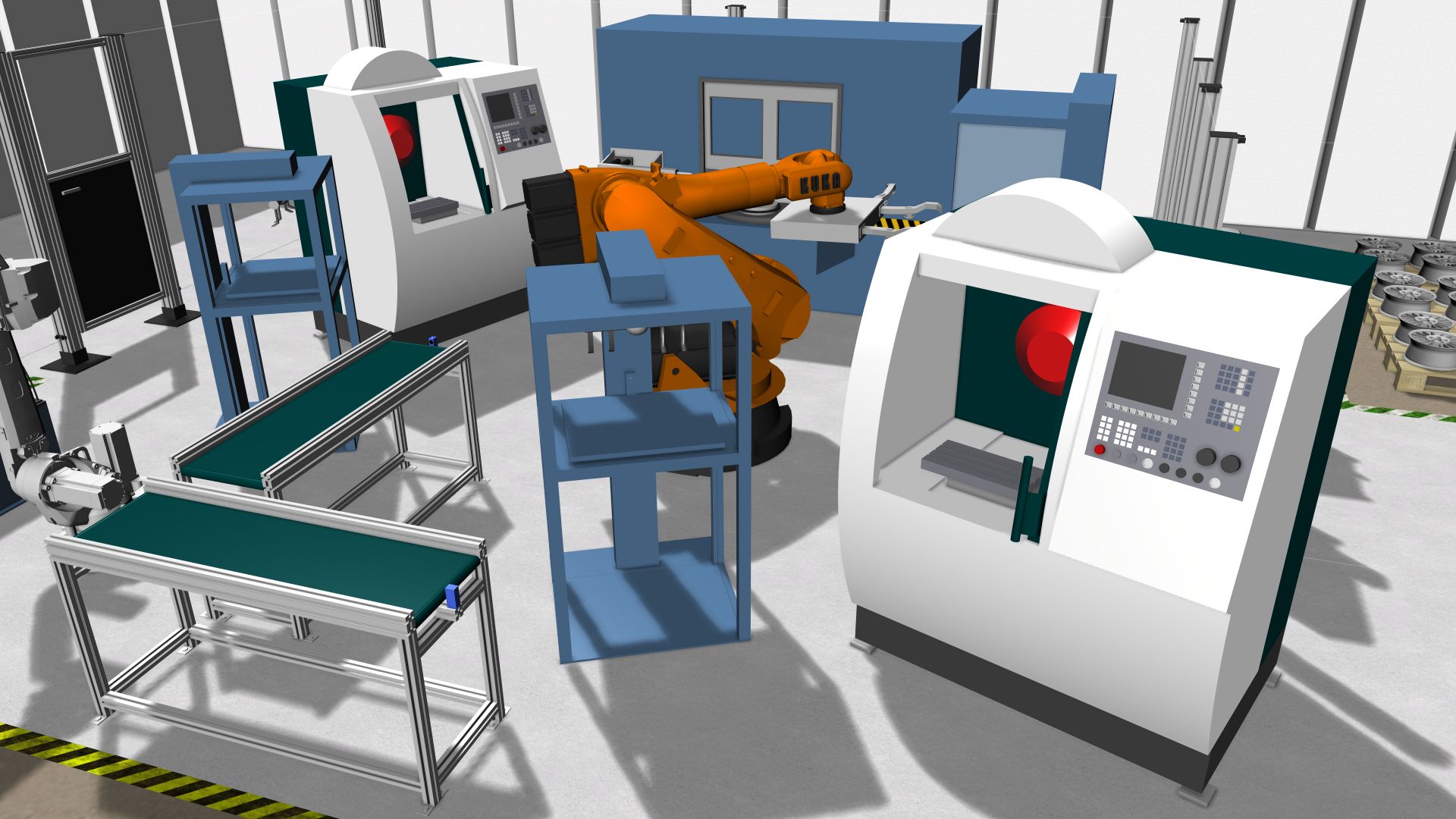
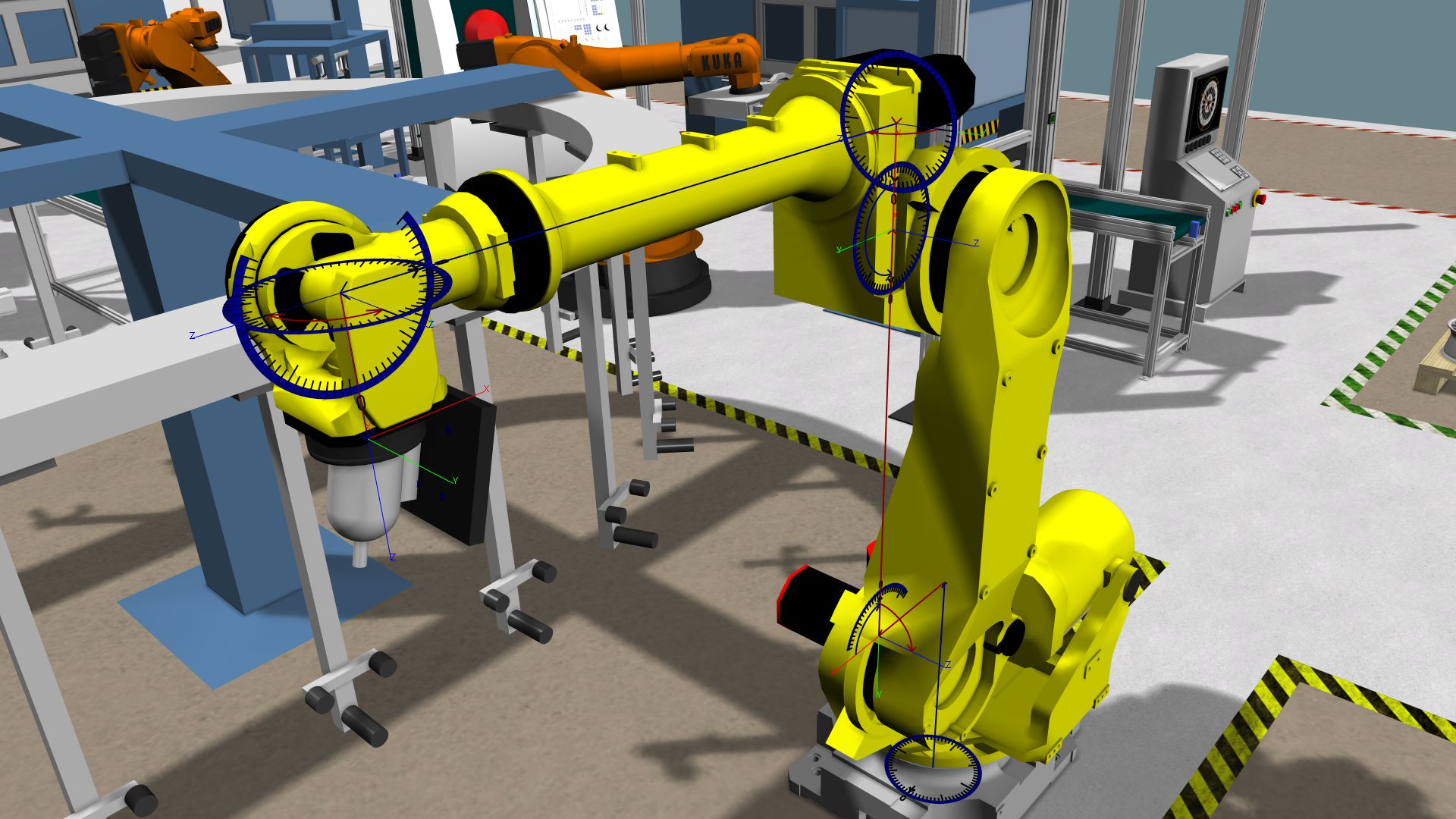
CIROS Studio ist die Software zur 3D-Fabriksimulation. Mit CIROS Studio modellieren Sie Layouts und Prozesse, simulieren Roboterzellen und automatisierte Fertigungsanlagen und visualisieren Abläufe. CIROS Studio spannt einen Bogen über die Bereiche Anlagenplanung, Konstruktion, Elektroplanung, Steuerungsprogrammierung, Inbetriebnahme, Bedienertraining, Vertrieb und Marketing. Seit über 25 Jahren entwickeln wir die Software, vertreiben sie erfolgreich in der Industrie und bieten Wartung, Support, Schulungen und Dienstleistungen aus einer Hand an. Gern vereinbaren wir einen Termin mit Ihnen, um Ihnen CIROS Studio individuell für Ihren Anwendungsfall per Web-Meeting oder persönlich zu präsentieren. Einen ersten Überblick über die Möglichkeiten von CIROS Studio erhalten Sie im Folgenden.
Vergleichen Sie CIROS Studio mit anderen 3D-Simulationslösungen wie Siemens Process Simulate (Tecnomatix), Siemens RobotExpert oder DELMIA von Dassault Systèmes (3ds). Entdecken Sie CIROS Studio als technisch ebenbürtige Alternative zu deutlich geringeren Anschaffungs- und Wartungskosten. Profitieren sind von der ständigen Weiterentwicklung unserer Software made in Germany. Sie haben individuelle Vorstellungen und Anpassungswünsche? Kein Problem: Wir reagieren schnell und kompetent auf Ihre Ideen!
Warum Simulation mit CIROS Studio? Sparen Sie Kosten! Vermeiden Sie Fehlplanungen, Fehlentwicklungen und Fehlanschaffungen durch abgesicherte Entscheidungen. Realisieren Sie kürzere Taktzeiten. Reduzieren Sie die Gefahr verzögerter Inbetriebnahmen. Gewinnen Sie neue Mitarbeiter und steigern Sie die Mitarbeiterzufriedenheit durch den Einsatz modernster High-End-Software. Vereinbaren Sie eine kostenlosen Potentialcheck für Ihr Unternehmen!
CIROS Studio wird typischerweise für die folgenden Anwendungen genutzt:
Nutzer von CIROS Studio stammen vorwiegend aus den folgenden Domänen:
Dies sind die die Top-Features von CIROS Studio:
CIROS Studio ist die modulare Software zur 3D-Fabriksimulation. Durch die Zusammenstellung der relevanten Pakete erhalten Sie die optimale Software für genau Ihre Aufgabenstellung. Zusätzliche Pakete können zu einem späteren Zeitpunkt einfach und schnell ergänzt werden. Die folgenden Pakete mit den jeweiligen Features sind verfügbar:
Bereits das Basispaket erlaubt die Modellierung und Simulation von Geometrie, Mechanik und Elektrik.













Im Modellanimationspaket sind Features enthalten, die plausible Visualisierungen erlauben und dabei eine aufwändige Modellierung zur korrekten Simulation vermeiden.






CIROS Studio kann eine Menge – aber nicht alles:
Im Folgenden sind Anforderungen von CIROS Studio an Hardware und Software aufgelistet.
CIROS wird für Microsoft Windows 11 für x64-Prozessoren entwickelt. Sie sollten eine Windows-Version verwenden, die noch Mainstream-Support von Microsoft erhält.
Gerne unterstützen wir Sie bei der erfolgreichen Arbeit mit CIROS Studio:
Sie interessieren sich für den Einsatz von CIROS Studio? So geht es weiter:
Hier finden Sie weitere Informationen im Internet:
Hier können Sie Informationen herunterladen:
Sie sehen gerade einen Platzhalterinhalt von Vimeo. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von Facebook. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von Instagram. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von X. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr Informationen{kind=link}
{kind=link}
{kind=link}